
近年、AGV(Automated Guided Vehicle)と呼ばれる自律走行型の荷物運搬ロボットが倉庫など幅広い分野で活用されています。しかし、既存のAGVは倉庫での運搬、飲食物のデリバリー、工場の建物間運搬など、それぞれの用途に特化して提供されています。ハードウェアの基本的な機能は共通しているにもかかわらず、他の用途への転用が難しい状況です。
我々の「動く板Project」は、こうした課題を解決するべく、特定の用途に縛られず、様々なシステムやハードウェアと容易に連携・拡張が可能なIoTスマートデバイス「動く板NEO」を開発しています。
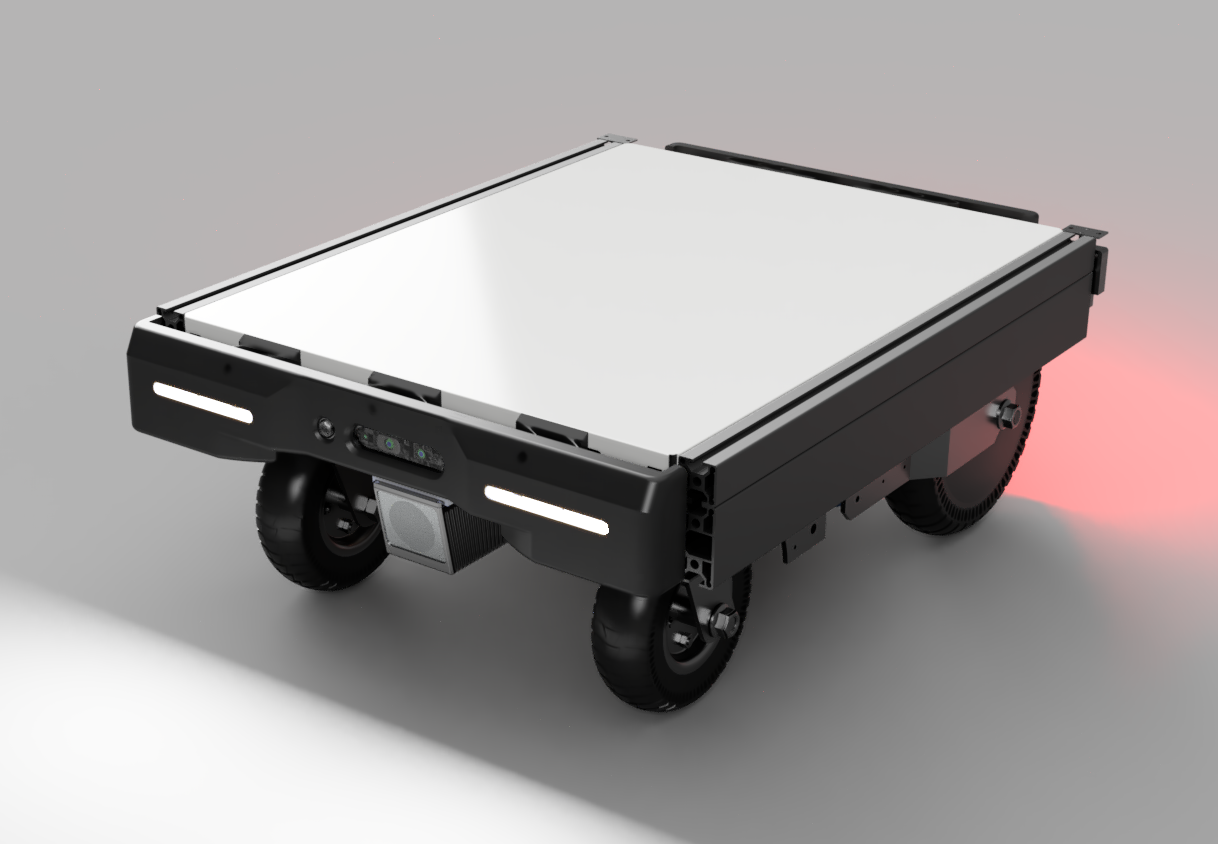
「動く板NEO」は自律走行可能な台車型ロボットです。LiDARやIMUといったセンサーで周囲の情報を収集し、設定されたルートに沿って目的地まで走行します。さらに、台車の上に様々なモジュールを取り付けることで、物の運搬だけでなく、周囲の環境情報の収集など、多様な用途に応用できます。
現在はプロトタイプ機「動くいた」の開発が終わり、次世代機である「動くいたNEO」を開発しています。写真のCG以外のものはプロトタイプ機のものです。
ものの移動やセンシングなど、何か動かしながらデータを取得したり、「何かを動かす」システムを開発したいと考えている人や団体
動く板は他のデバイスと組み合わせて使うことを前提に設計されています。そのため、ハードウェアとソフトウェアの両面で高い拡張性を持たせ、板の上に様々なものを載せたり、他のシステムと連携させたりすることが容易になっています。
これにより、これまで実現できていなかった何かを動かすという自動化を比較的低価格で手軽に実現することができるようになります。

都内理工系大学の有志メンバーによるチームです。
ある授業をきっかけに始めたプロジェクトで、去年から継続して活動を続けています。
ソフトウェア開発、ハードウェア開発などそれぞれのスキルを持った学部学科も様々な5人のメンバーを軸に活動しています。
この作品を共有


