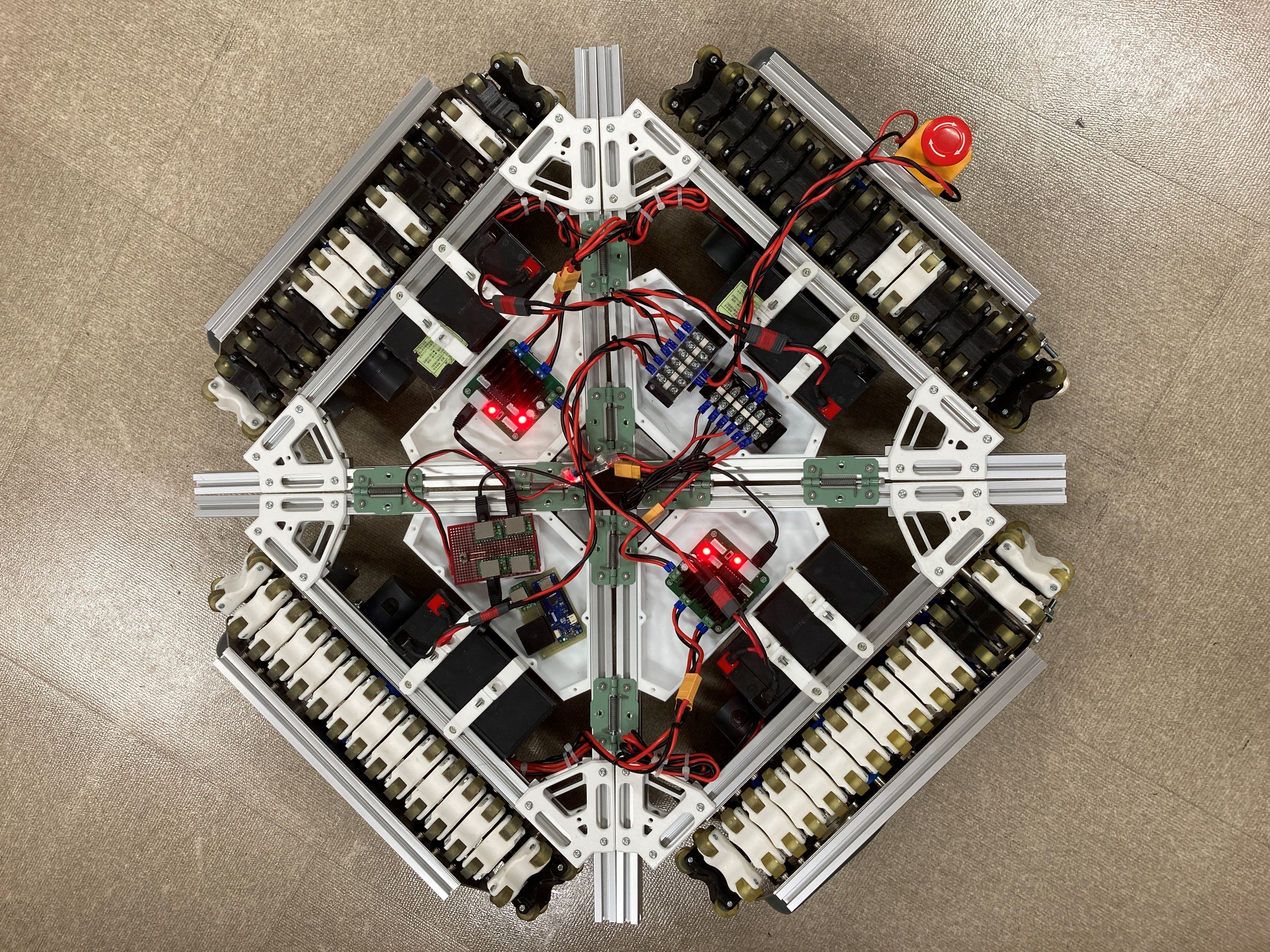

全方位移全方位移動可能クローラ(Omni Direction Crawler)は高い走破性能を持つクローラ機構と車体姿勢を変えずに全方位移動ができるオムニホイール機構を組み合わせた、草道、砂利道等に代表される不整地を全方位移動で走行できる移動機構です。
この機構の原理を説明をするにあたってオムニホイール機構とは何なのかについて説明します。この機構はホイールの回転方向に対して軸方向に受動的つまりは自由に動くサイドホイールを持ったタイヤを円周上に3つ以上組み合わせた移動機構で、ホイールの軸側にかかる力を自由に動くサイドホイールが吸収することで全方位移動に移動することができる機構です。このオムニホイールが軸方向へ自由に動作できる特性をクローラにも取り入れることによって、クローラを3つ以上組み合わせ自由に動作させます。そしてクローラ自体の接地安定性、段差踏破性によって不整地でも安定して動くことができます。
この機構の最初に開発したのは東京工業大学の広瀬先生で”座布団ロボット”というのが最初になり、その後もいくつか研究が続けられてきました。しかしここ十数年の研究は少なく、実際の不整地での動作実績もあまりありません、そして重量物を載せた際の動作特性がまだわかってないなど、技術としてまだ未知数な面があります。今後のロボットがより広範囲に活躍するためには移動機構の開発が重要であり、この機構をより細かく研究することでより実用的なロボットが開発できると考えていおります。
この機構は屋内の整地された環境でロボットの機体及びサービスの研究・開発を行っている人・チームが、実環境にロボットを適応させる際に利用することで大きなメリットがあると考えています。
従来のロボットの研究・開発に用いられているオムニホイールを、制御や知見をそのまま利用し不整地でもロボットを動かすことができます。また屋内の環境においてもクローラ自体がタイヤに比べスリップしずらいことからオムニホイールに比べロボットが確実に動作することができ、通常のクローラと比べても機構の配置を自由に決めることができるため接地面積を稼ぎ安定して動作させることができます。

元都立産業技術高専の学生で現在は千葉工業大学大学院の修士課程で研究を行っています。この機構は高専の3年次に思いつき趣味の範囲で細々と開発を続けてきました。高専ロボコンやFGCに日本代表として参加してきました。現在は個人と大学院の研究でモノづくりを続けており、MFTなどにも出展してきました。
この作品を共有


