
F3Handは,湾曲型空気圧人工筋を骨格兼アクチュエータとして用いることで,軽量かつ柔軟な把持を実現した5指義手です.人工筋を外観の一部とすることで,スタイリッシュな外観を実現しています.
前腕欠損者の生活を支援するため,様々な5指電動義手が開発されてきました.5指電動義手は電動アクチュエータにより対象を把持できるものの,いくつかの課題があります.多数のアクチュエータと複雑な機構のため,ソケットを含む一般的な5指電動義手は900g以上になります.重い義手は,ユーザが義手の使用をあきらめる大きな要因となっています.また,剛性の高い指は,柔軟な把持を実現することが困難です.そこで,湾曲型空気圧人工筋を用いて駆動する義手”F3Hand”を開発し,これらの課題解決を目指しました.
F3Handは,5指が人間の手と同様に配置されています.各指は,湾曲型空気圧人工筋の動きに追従できる2重関節を備えています.湾曲型空気圧人工筋は,ゴムチューブを伸縮性の異なる2種類の布で挟み込む構造であり,ポリウレタンチューブから人工筋に空気を送り込むと,人工筋は高伸縮の布と低伸縮の布の特性の違いにより一方向に湾曲します.駆動ユニットは,電磁バルブやバッテリを内蔵するコントロールユニット,筋隆起センサ,小型CO2ボンベで構成されます.筋隆起センサは,内蔵するフォトリフレクタで筋肉の隆起を検出することができるセンサです.ユーザがサポータソケットに挿入した筋隆起センサを押すことでソレノイドバルブが開き,空気が人工筋に送られます.親指の付け根に小型のモータを内蔵し,ボタンを押すことで親指の角度を切り替えることができます.その結果,F3Handは軽量(340g)で,柔軟な把持と自然な動作を達成しました.
協力:ダイヤ工業株式会社小川和徳氏,大阪工業大学アシスティブデバイス研究室
日常生活において,片手の作業に不便を感じている前腕欠損者です.
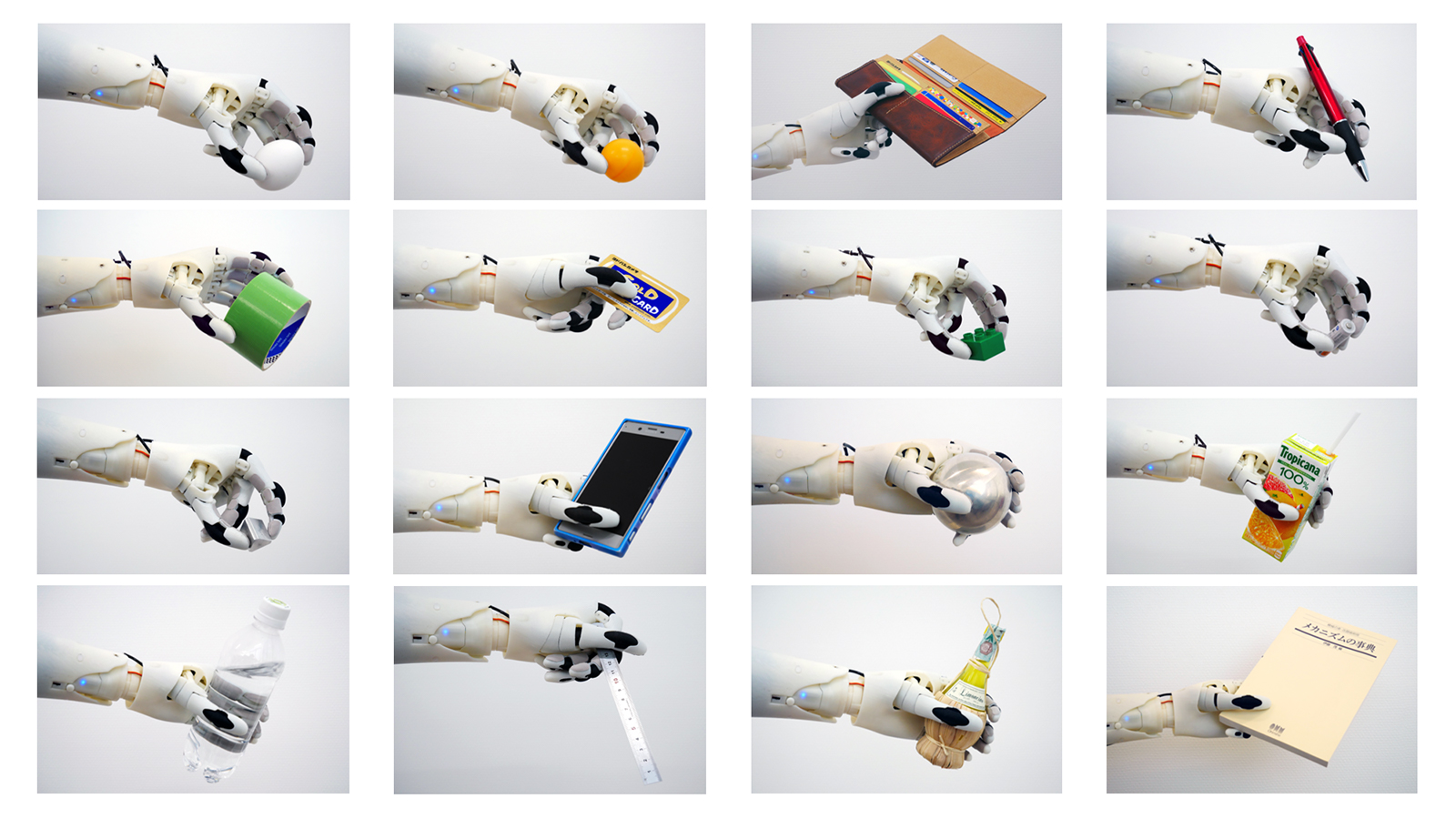
F3Handは,前腕欠損者の日常生活を補助する5指義手です.人工筋と2重関節を組み合わせることで,様々な物体形状になじむ柔軟な把持ができます.ユーザは簡単な操作のみで,ペットボトルを手のひら全体で握りこむ把持,卵やボールなどの球状物体をつまむ把持など,自然に動作させることができます.義手本体は340gと軽量で,長時間装着してもユーザの負担になりにくい重さです.

大阪工業大学大学院 ロボティクス&デザイン工学研究科 ロボティクス&デザイン工学専攻 修士2年.
湾曲型空気圧人工筋により駆動する5指電動義手について研究しています.
James Dyson Award 2018 国内第3位受賞
この作品を共有


