
搭載カメラからの一人称視点映像を見るだけで無線操縦できる移動体ロボットの操縦システムです。
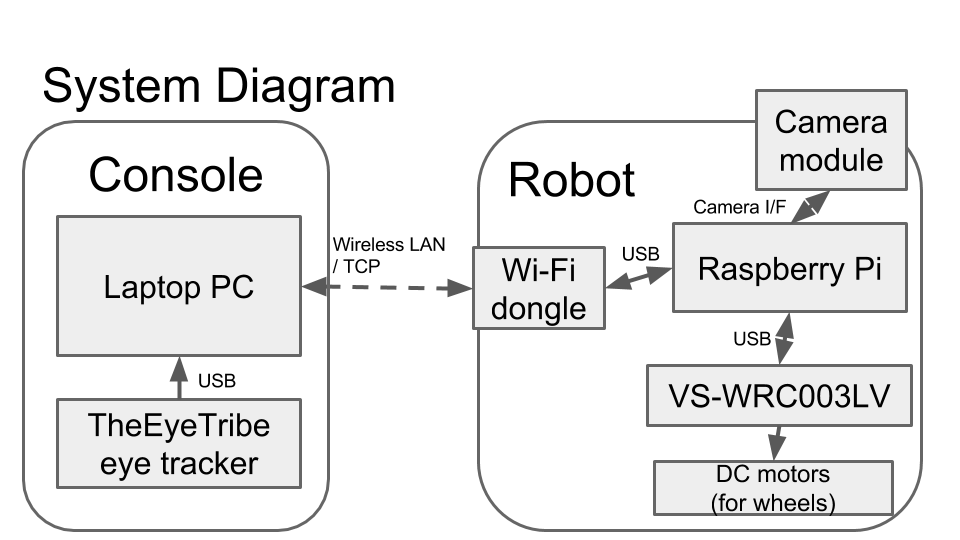
ロボットに搭載したカメラからの映像は無線を介してPCの画面に表示されます。この映像を目で見ている操縦者の視線をセンサーを用いて計測し、それに応じてロボットの前進・後退・旋回を行います。映像内の特定の物体や行きたい方向を目で追うことでそこに自然と向かっていくことができるのがポイントです。また、後退や急旋回のように見えない方向に移動したい場合は意図的に画面の外側を見て指令することもできます。
このシステムでは、ロボットの移動に伴って映像が動き、また操縦者がその映像を目で追うという2つが相互に作用することになります。映像の例のように1つの物体や地点を見つめるとその位置に漸近していき、精度良く停車させることもできます。同様の方法で障害物を回避したり隙間を通過させることもできます。ロボットのフィードバック制御系と操縦者が一体になる感覚が面白いのではないかと思います。
* 使用部品
操縦用端末:
ラップトップPC
視線検出センサー:
Eye Tribe Tracker (TheEyeTribe)
無線操縦装置:
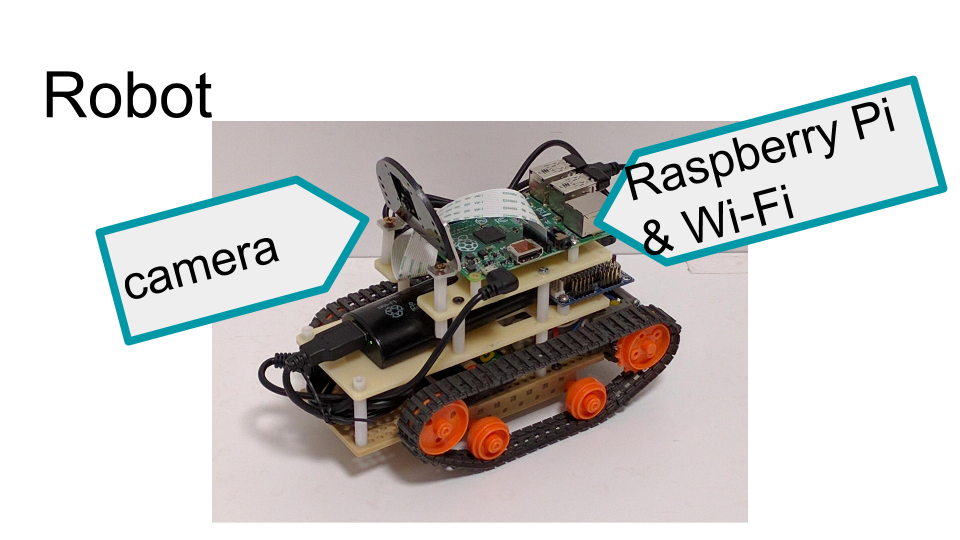
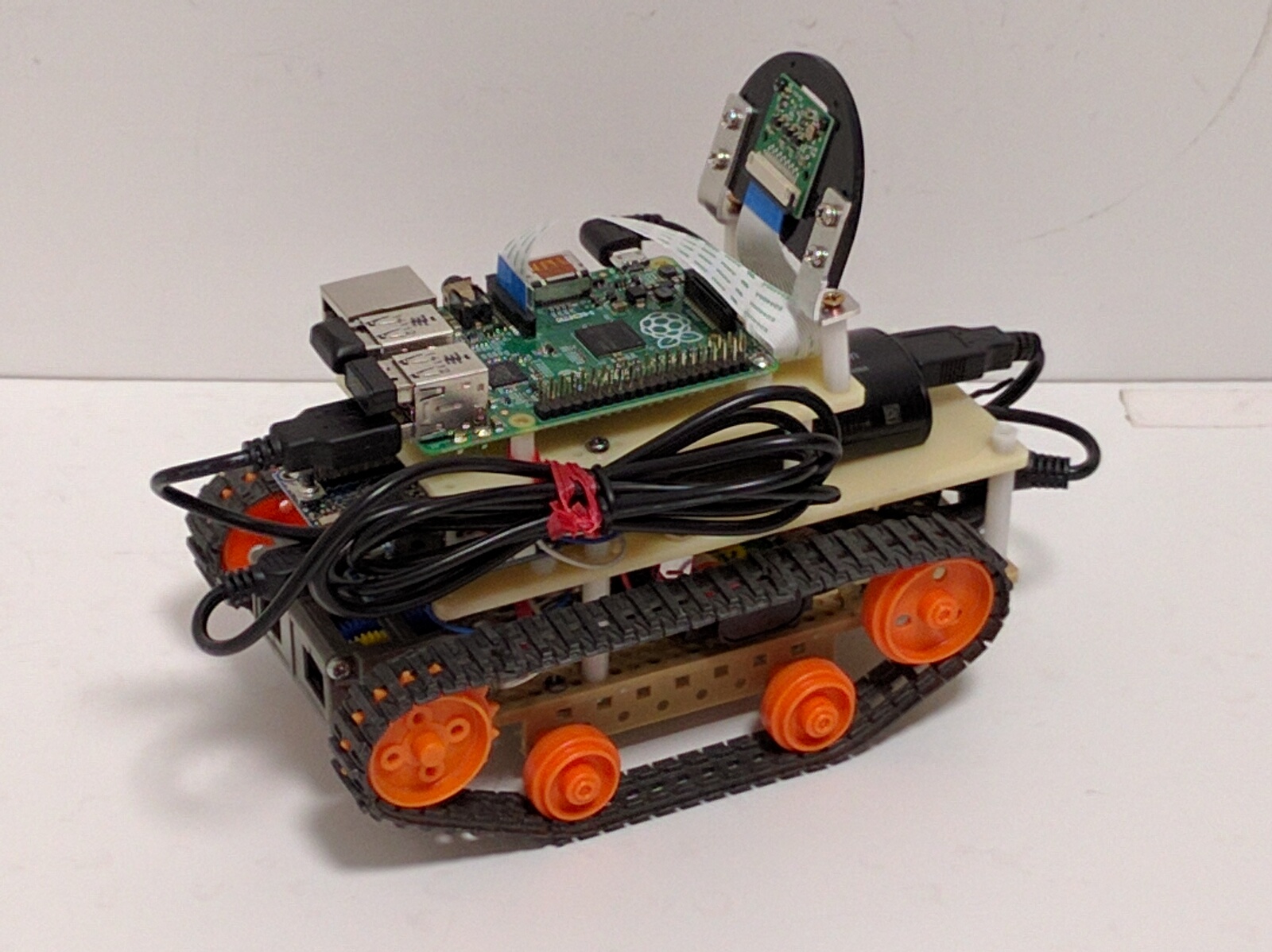
Raspberry Pi B+、Raspberry Pi用カメラ、USB-WifiドングルWLI-UC-GNM2(BUFFALO)、VS-WRC003LV(VSTONE)
ロボット機構:
ダブルギヤボックス(TAMIYA)、トラック&ホイールセット(TAMIYA)、ABS板、ジュラコンスペーサ、アルミ板、その他
ホビーロボットユーザー等。
視線による操縦という方式の性質上、一時的・恒久的に四肢の運動ができないユーザーでも使用可能である。
視線入力により機械を操作することで身体機能を拡張し、新しい体験を提供する。
また、視線入力インターフェースの新しい可能性を模索する。

各種ロボットコンテストに出場しています。
http://robot.art.coocan.jp/
この作品を共有


